
BPF双一次変換
Transform function of BPF BPF(Band-pass filter): バンドバスフィルタ [G(s)=\frac{\omega_n s/Q}{s^2+\omega_n s/Q+\omega_n^2}] $\omega_n$: バンド中心周波数(設計値) $Q$: カットオフ周波数(設計値) 双一次変換 [s=\frac{2}{T_s}\frac...
Transform function of BPF BPF(Band-pass filter): バンドバスフィルタ [G(s)=\frac{\omega_n s/Q}{s^2+\omega_n s/Q+\omega_n^2}] $\omega_n$: バンド中心周波数(設計値) $Q$: カットオフ周波数(設計値) 双一次変換 [s=\frac{2}{T_s}\frac...

Sync Obsidian on All Platforms (Windows, Mac, Android, iOS) and Multiple Devices 0. Requirements Obsidian Plugin: Remotely Sync Cloud Storage Service: WebDAV ...
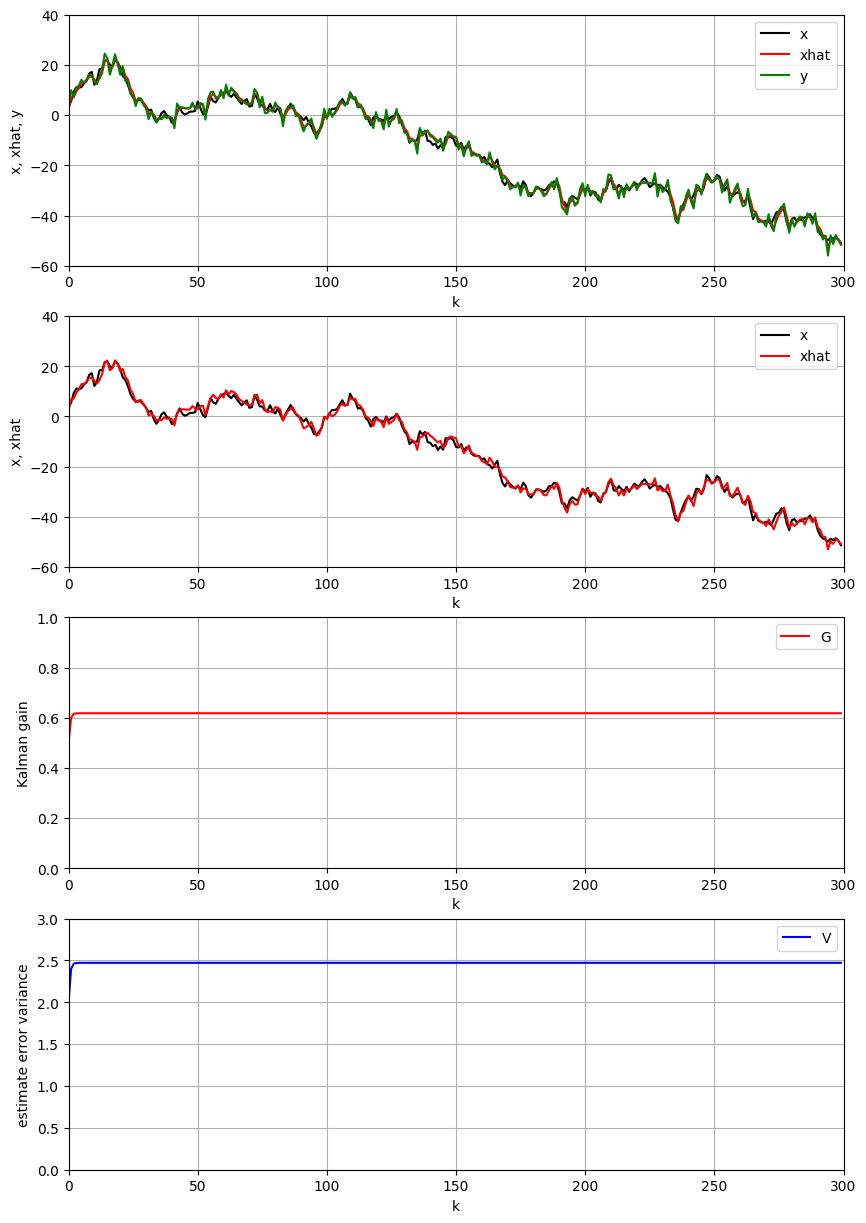
Home Page:Youkoutaku 1.問題 スカラー変数のカルマンフィルタについて,観測雑音と システム雑音の分散を変化させ,これらと状態推定値 の精度およびカルマンゲインとの関係について,シミュ レーション例を通して考察しなさい 設定するパラメータ システム雑音の分散: $σ_w^2$ 観測雑音の分散: $σ_2$ 係数: ...

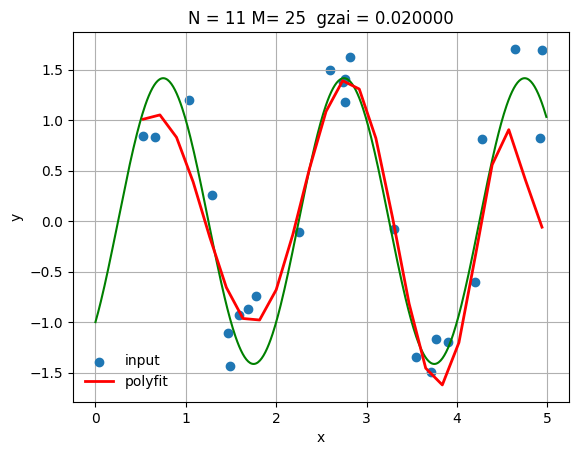
Homepage: https://youkoutaku.github.io/ 1.問題 観測データが ($x_1$, $y_1$), … , ($x_M$, $y_M$) が得られたとき,この観測結果を直線 $y=\theta_0+\theta_1 x$ に回帰したい.回帰直線のパラメータ $\theta_0$ と $\theta_1$ を逐次ベイズ学習により推定し,その結果を考 察しな...
Hotkeys are helpful for working efficiently. However, checking the official documentation that introduces the hotkeys is not always practical because it often includes many unnecessary hotkeys. Her...
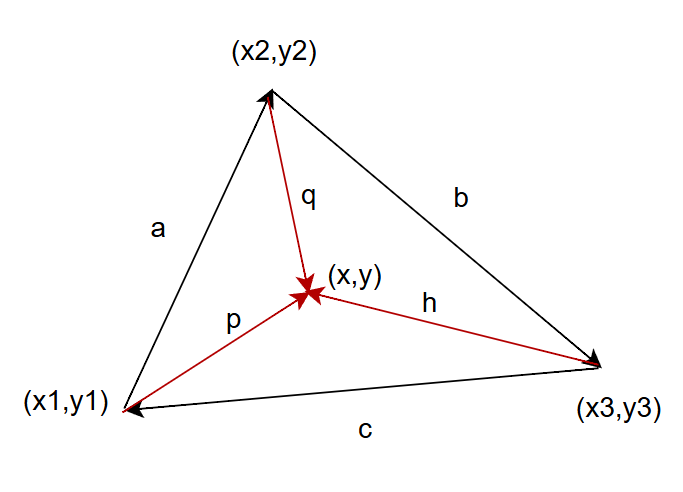
三角形の線の方程式 まず、与えられた三角形の各頂点 $(x_1, y_1)$, $(x_2,y_2)$,$(y_1,y_2)$ を通る直線の方程式を求めます。 頂点 $(x_1, y_1)$ から $(x_2, y_2)$ への直線の方程式: \[(y_2 - y_1)(x-x_1) - (x_2 - x_1)(y-y_1)=0\] 頂点 $(x_2,...
Home Page:Youkoutaku import numpy as np import scipy as sp import pandas as pd from pandas import Series, DataFrame from sklearn.metrics import mean_squared_error import matplotlib.pyplot as plt ...
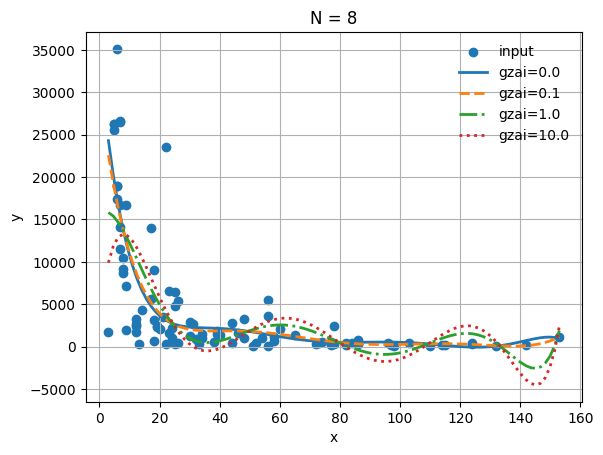
Home Page:Youkoutaku import numpy as np import scipy as sp import pandas as pd from pandas import Series, DataFrame import matplotlib.pyplot as plt import matplotlib as mpl import seaborn as sns %...
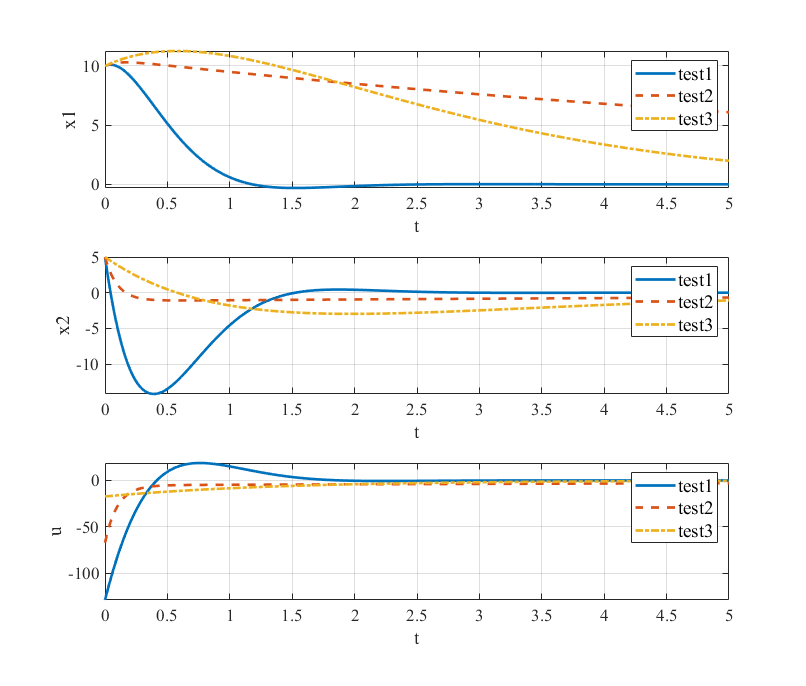
Problem Consider a simple system: [\begin{bmatrix} \dot x_1 \ \dot x_2 \end{bmatrix}=\begin{bmatrix} 0 &1\ 0.5 &0 \end{bmatrix}\begin{bmatrix} x_1 \ x_2 \end{bmatrix}+\begin{bmatrix}0\ 1 \...
By the HJB equation, we discuss the linear quadratic regulators (LQR) for continuous systems. Continuous systems Consider a continuous system as the following equation. [\dot{x}{(t)}=f(x{(t)},u_{...