WakaTime コーディングの追跡ツール
WakaTime: コーディングの追跡ツール WakaTimeは、開発者向けに特別に設計された強力な生産性追跡ツールです。コーディングに費やす時間を自動的に測定することを提供します。 主な機能: 自動時間追跡: WakaTimeはバックグラウンドで動作し、様々なIDEやテキストエディタでのコーディング時間をシームレスに記録します。 言語とプロジェクトの記録: 異なるプログラミ...
WakaTime: コーディングの追跡ツール WakaTimeは、開発者向けに特別に設計された強力な生産性追跡ツールです。コーディングに費やす時間を自動的に測定することを提供します。 主な機能: 自動時間追跡: WakaTimeはバックグラウンドで動作し、様々なIDEやテキストエディタでのコーディング時間をシームレスに記録します。 言語とプロジェクトの記録: 異なるプログラミ...

Ubuntu is a popular Linux operating system, often used for embedded development. It’s possible to install both Ubuntu and Windows OS on the same machine, with Ubuntu files stored on a USB drive, ma...
GitHub Education 学生認証でPro機能を使える! GitやGitHubは、プログラムのバージョン管理ソフトであり、オープンソースが多い学習サイトである。 学生メールで認証すれば、GitHub proが得られるため、色々な拡張機能や連携ソフトのProバージョンが得られる。 さらに、GitHub Copilot はGithubが提供しているエディタに搭載されているAIコード...

Zotero Zotero は,ダウンロードしたPDF論文を入れただけで,自動的に著者,雑誌,出版年を整理できる. 無料 PDF Reader メモ WebDevによる多端末の同期可能 そのほか Zotero公式の同期スペースは無料で500MBまでのため,たくさんPDFを導入すると有料が必要である.その際には,無料で25GBを利用できるWebDev Infini...
System Modeling Discrete linear time-invariant system The dynamics of the system are represented by the following state-space equation: [x_{[k+1]}=Ax_{[k]}+Bu_{[k]}] where: $x_{[k]}\in\mathbb...

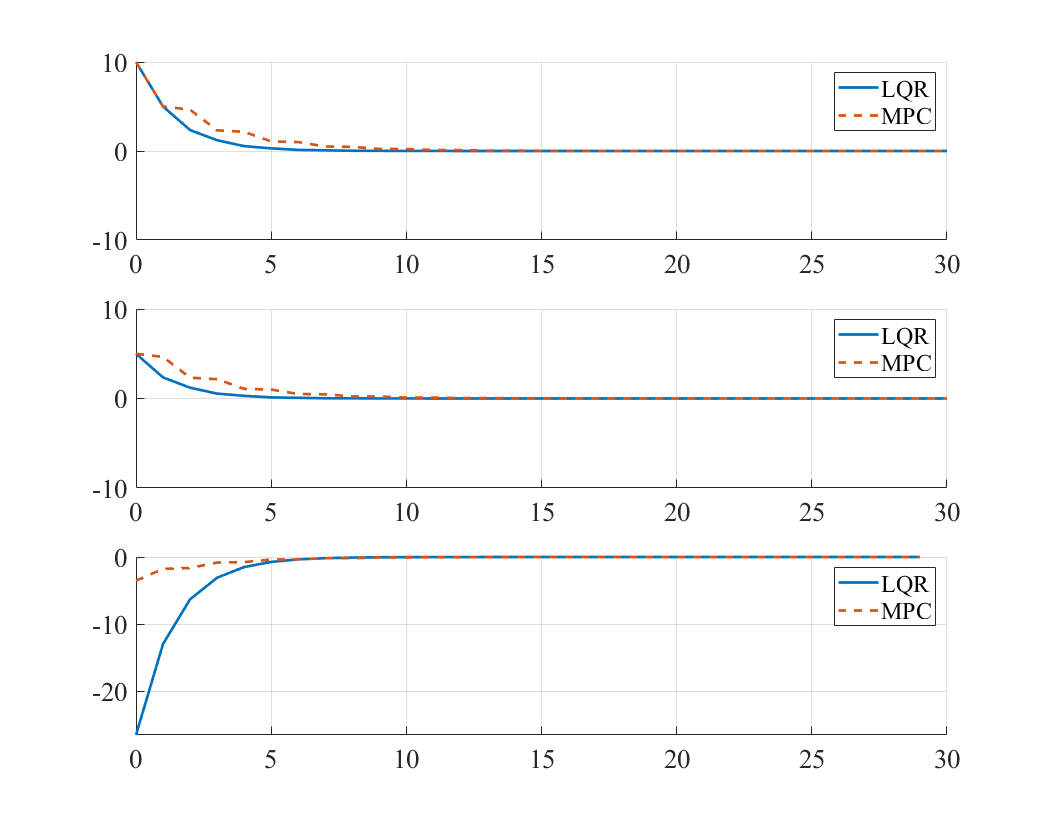
Model Predictive Control (MPC), known as Receding Horizon Control, is a method that involves solving an optimal control problem over a finite prediction horizon at each sampling time to calculate t...
Problem Formulation Consider a discrete-time linear system, the state-space equation is as [x_{[k+1]}=f(x_{[k]},u_{[k]})=Ax_{[k]}+Bu_{[k]}] where $x_{[k]}\in\mathbb{R}^n,u_{[k]}\in\mathbb{R}^p$ a...
Problem Formulation Consider a discrete-time linear system, the state-space equation is as [x_{[k+1]}=f(x_{[k]},u_{[k]})=Ax_{[k]}+Bu_{[k]}] where $x_{[k]}\in\mathbb{R}^n,u_{[k]}\in\mathbb{R}^p$ a...

DR-TVFC(Distributed Robust Time-Varying Formation Control) of MASs under Disturbances by Guang-Ze Yang $^1$ and Zi-Jiang Yang $^2$ Abstract: This work considers the problem of time-varying for...
テーマ: 分散型電源システムのパワーコンディショナを中心としたシステム開発 部署:エネルギー事業部 ソフトウェア開発G 感想 研究と比べて、安全性や誤差、バラツキの考慮が重要であること。ひとつ機能を変更しても、いろんな安全や保障、その機能に影響されるところも考えなければならないこと。 プログラムでもモデルでもハードからソフトまでの商売製品として、開発の設計仕様書の量が違って、ひと...