LQR for tracking
Problem Formulation
Consider a discrete-time linear system, the state-space equation is as
\[x_{[k+1]}=f(x_{[k]},u_{[k]})=Ax_{[k]}+Bu_{[k]}\]where $x_{[k]}\in\mathbb{R}^n,u_{[k]}\in\mathbb{R}^p$ are system state and input, $A_{[k]}\in\mathbb{R}^{n\times n}$, $B_{[k]}\in\mathbb{R}^{n\times p}$ are state matrices for system.
The tracking reference is as
\[x^r_{[k+1]}=A_rx^r_{[k]}\]Define the tracking error as
\[e_{[k]}=x_{[k]}-x^r_{[k]}\]Define the increase of input as
\[\Delta u_{[k]}=u_{[k]}-u_{[k-1]}\implies u_{[k]}=\Delta u_{[k]}+u_{[k-1]}\]Then, the state-space equation is rewrite as
\[x_{[k+1]}=Ax_{[k]}+B(\Delta u_{[k]}-u_{[k-1]})\]Define the augmented states as
\[\begin{bmatrix} x_{[k+1]}\\x^r_{[k+1]}\\u_{[k]} \end{bmatrix} =\begin{bmatrix} A &0_{n\times n} &B\\0_{n\times n} &A_r &0_{n\times p}\\ 0_{p\times n} &0_{p\times n} &I_{p\times p} \end{bmatrix}\begin{bmatrix} x_{[k]}\\ x^r_{[k]} \\ u_{[k-1]} \end{bmatrix}+\begin{bmatrix} B\\0_{n\times p} \\ I_{p\times p} \end{bmatrix}\Delta u_{[k]}\]where
\[z_{[k]}:=\begin{bmatrix} x_{[k]}\\ x^r_{[k]} \\ u_{[k-1]} \end{bmatrix}, A_z:=\begin{bmatrix} A &0_{n\times n} &B\\0_{n\times n} &A_r &0_{n\times p}\\ 0_{p\times n} &0_{p\times n} &I_{p\times p} \end{bmatrix}, B_z:=\begin{bmatrix} B\\0_{n\times p}\\I_{p\times p} \end{bmatrix}\]Then, we have
\[z_{[k+1]}=A_zz_{[k]}+B_z\Delta u_{[k]}\] \[e_{[k]}=[I_{n\times n}\;-I_{n\times n}\;0_{n\times p}]z_{[k]}=C_zz_{[k]}\]Define the quadratic performance function as
\[J=h\left(e_{[N]}\right)+\sum_{k=0}^{N-1}g\left(e_{[k]},u_{[k]}\right)\]where
\[\begin{aligned}&h\left(e_{[N]}\right)=\frac{1}{2}e_{[N]}^{T}Se_{[N]}\\&g\left(e_{[k]},u_{[k]}\right)=\frac{1}{2}[e_{[k]}^{T}Qe_{[k]}+\Delta u_{[k]}^{T}R\Delta u_{[k]}]\end{aligned}\]Solving
\[J= \frac{1}{2}e_{[N]}^{T}Se_{[N]} +\frac{1}{2}\sum_{k=0}^{N-1}[e_{[k]}^{T}Qe_{[k]}+\Delta u_{[k]}^{T}R\Delta u_{[k]}]\] \[J= \frac{1}{2}(C_zz_{[N]}) ^{T}S(C_zz_{[N]}) +\frac{1}{2}\sum_{k=0}^{N-1}[(C_zz_{[k]})^{T}QC_zz_{[k]}+\Delta u_{[k]}^{T}R\Delta u_{[k]}]\] \[J= \frac{1}{2}z_{[N]}^{T}(C_z^TSC_z)z_{[N]} +\frac{1}{2}\sum_{k=0}^{N-1}[z_{[k]}^T(C_z^{T}QC_z)z_{[k]}+\Delta u_{[k]}^{T}R\Delta u_{[k]}]\]- $S^z=C_z^TSC_z$
- $Q^z=C_z^TQC_z$
According to LQR Gain ($x \to z$), the optimal increase of input:
\[\Delta u^\ast_{[N-k]}=-F_{[N-k]}z_{[N-k]}\]where
\[F_{[N-k]}=(B^{T}P_{[k-1]}B+R)^{-1}B^{T}P_{[k-1]}A\]\[P_{[k]}=(A-BF_{[N-k]})^TP_{[k-1]}(A-BF_{[N-k]})+F_{[N-k]}^TRF_{[N-k]}+Q\] \[P_{[0]}=S^z\implies P_{[1]}, \Delta u^\ast_{[N-1]}\implies \cdots P_{[k]}, \Delta u^\ast_{[N-k]} \cdots \implies P_{[N]}, \Delta u^\ast_{[0]}\]Notice that the increase of input is optimized.
The optimal input is
\[u_{[k]}^\ast=\Delta u^\ast_{[k]}+u^\ast_{[k-1]}\]Simulation
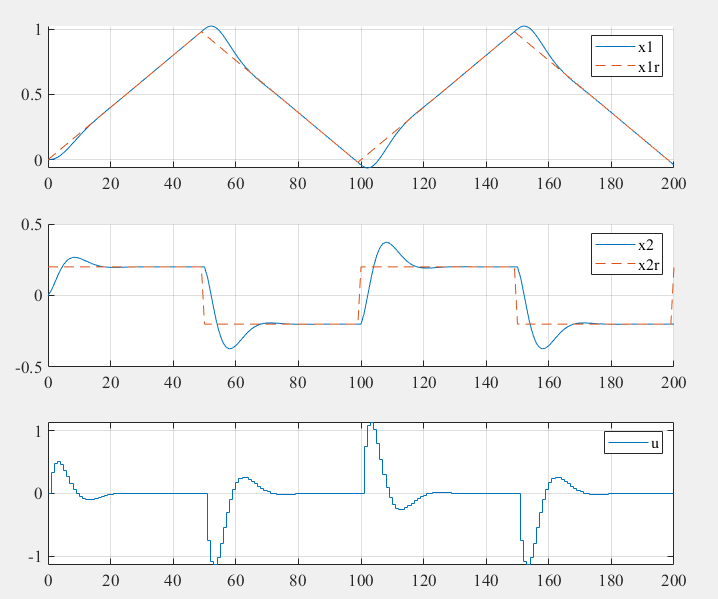
Consider a simple 2nd-order system:
\[\begin{bmatrix} \dot x_1 \\ \dot x_2 \end{bmatrix}=\begin{bmatrix} 0 &1\\ 0 &0 \end{bmatrix}\begin{bmatrix} x_1 \\ x_2 \end{bmatrix}+\begin{bmatrix}0\\ 1 \end{bmatrix}u(t)\] \[x^r(0)=\begin{bmatrix} 0\\ 0.2\\ \end{bmatrix}\]- weight matrix
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
%% LQR for Tracking problem
%-----------------------------------------------%
% Youkoutaku: https://youkoutaku.github.io/
% Date: 2024/01/16
% Description: LQR for tracking problem. The reference signal is time-varying.
%-----------------------------------------------%
% Augmented_System_Input.m is a function to create the augmented system for the increase of input.
% [Az,Bz,Qz,Rz,Sz] = Augmented_System_Input(A,B,Q,R,S,Ar) creates the augmented system for the increase of input.
clear;
close all;
clc;
set(0, 'DefaultAxesFontName', 'Times New Roman')
set(0, 'DefaultAxesFontSize', 14)
%% System Model
A = [0 1; 0 0];
n = size(A, 1);
B = [0; 1];
p = size(B, 2);
C = [1 0; 0 1];
D = [0; 0];
%% System Setting
Ts = 0.1; %Sample time
sys_d = c2d(ss(A, B, C, D), Ts); %discretization of continuous time system
A = sys_d.a; %discretized system matrix A
B = sys_d.b; %discretized input matrix B
%% Weight matrix
Q = [1 0; 0 1]; %R^(n x n) tracking error weight
S = [1 0; 0 1]; %R^(n x n) reference weight
R = 0.1; %R^(p x p) input weight
%% Initial state
x0 = [0; 0];
x = x0;
%input init
u0 = 0;
u = u0;
%% Reference Signal
xr = [0; 0.2];
Ar = c2d(ss( [0 1; 0 0],[0; 0],[1,0; 0,1],[0; 0]),Ts).A; % Augmented matrix
z = [x; xr; u];
%% Augmented System
[Az, Bz, Qz, Rz, Sz] = Augmented_System_Input(A, B, Q, R, S, Ar);
%% LQR Gain
[F] = LQR(Az, Bz, Qz, Rz, Sz);
%% Simulation
k_steps = 200;
x_h = zeros(n, k_steps);
x_h(:, 1) = x;
u_h = zeros(p, k_steps);
u_h(:, 1) = u;
xr_h = zeros(n,k_steps);
xr_h(:, 1) = xr;
for k = 1:k_steps
% Reference Signal
%xr = [sin(0.05 * k); 0.05*cos(0.05 * k)];
if (k==50)
xr = [xr(1) ; -0.2];
elseif (k==100)
xr = [xr(1) ; 0.2];
elseif (k==150)
xr = [xr(1) ; -0.2];
elseif (k==200)
xr = [xr(1) ; 0.2];
end
% Increase of input
Delta_u = -F * z;
% Input
u = Delta_u + u;
% Update System
x = A * x + B * u;
xr = Ar * xr;
z = [x; xr; u];
% Save data
x_h(:, k + 1) = x;
u_h(:, k + 1) = u;
xr_h(:, k + 1) = xr;
end
%% figure
subplot (3, 1, 1);
plot (0:length(x_h)-1,x_h(1,:));
hold;
plot (0:length(xr_h)-1,xr_h(1,:),'--');
hold off;
legend("x1","x1_r");
xlabel("step");
ylabel("position");
xlim([0 k_steps]);
grid on;
subplot (3, 1, 2);
plot (0:length(x_h)-1,x_h(2,:));
hold;
plot (0:length(xr_h)-1,xr_h(2,:),'--');
hold off;
legend("x2","x2_r");
xlabel("step");
ylabel("velocity");
xlim([0 k_steps]);
grid on;
subplot (3, 1, 3);
hold;
stairs (0:length(u_h)-1,u_h(1,:));
hold off;
legend("u");
xlabel("step");
ylabel("input");
xlim([0 k_steps]);
grid on;
LQR, a feedback control, selects the optimal feedback gain by dynamic programming. However, it can not solve the optimal problem for constraint.
Reference
- Chris Mavrogiannis. lec15_lqr
- 王天威. 控制之美(卷2). 清华大学出版社. 2023.